欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227






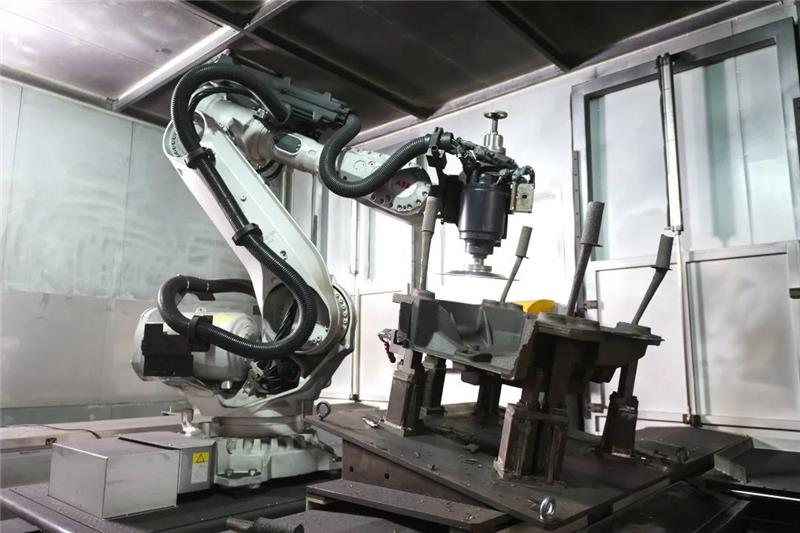
铸件通常具有三维表面结构,并且存在大量的非结构凹面和非参数凸面。凹面不容易用手从内部抛光。由于大量的凹面,在机械打磨过程中,很难找到基准面或固定可夹紧的结合面。此外,在加工中没有基准,很难保证精度。此外,当采用智能打磨方法时,对于具有大曲率的凹面的数据收集很容易被阻塞,导致数据收集不完整。
圆形表面的简单特征不明显,存在大量非结构性表面.除了铸造外凸的外表面,还有大量的内凹表面,这是难的结构凹表面。这些表面降低了测量精度和打磨精度.现有的方法采用人工测量和抛光,机械和智能相结合的方法进行加工仍处于实验阶段。







基于激光传感器的抛光机器人面对工厂恶劣的打磨环境有着的优势,即不受环境光的影响,精度也能满足铸件后处理的要求。通过数据驱动的预测方法可以在线预测打磨精度。
打磨表面粗糙度被认为是加工质量的关键指标之一.然而,由于磨粒分布的随机性和复杂性,很难预测。为了准确地估计抛光表面的粗糙度,有必要用多种方法获得打磨去除的材料量。通过打磨去除的材料量与多个参数有关,例如进给速度、转速、接触应力、打磨时间、工件材料、工件的几何特征以及磨头的状况。为
广泛使用的基于模型的方法是普雷斯顿方程,根据该方程,打磨期间的材料去除率与压力和介质与工件之间的相对速度成比例。



用于机器人引导操作的SUHNER组件——适用于所有机器人
工具:气动马达铣轴、锉刀、砂带磨光机和加工设备。用于去毛刺、抛光、切割的各种工具。
坚固耐用的加工单元,适用于要求苛刻的应用,可带或不带自动化工具更换,实现工厂自动化。
磨料:不同材料和应用的开发和培训。
特殊设备:带有集成力补偿的特殊接触法兰
磨料更换站:全自动更换磨料,用于工业连续操作。
机床制造商:机器人和机器人工具的集成。在金属和芯片制造行业、机床制造和金属表面处理方面有数十年的经验。

扫一扫手机网站







 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com